教員一覧(学科、施設別)教員紹介
先進工学部 ロボティクス学科
教授/宮川豊美 [先端メカトロニクス]

プロフィール
1960年11月生まれ / 博士(工学)
芝浦工業大学工学部機械工学科卒業
株式会社東芝 研究開発センター / 東京工業大学工学部非常勤講師 / 新エネルギー・産業技術総合開発機構主査 / 秋田工業高等専門学校教授 / 愛知工科大学工学部教授を歴任
趣味:ゴルフ / マラソン / 旅行&グルメ
専門
機械システム設計 / アクチュエータ / メカトロニクス
研究テーマ
ロボットコンポーネント(空圧アクチュエータ / 差動歯車機構)
ロボットシステム(ヒューマンメカトロニクス機器の設計とその制御法 / 特殊環境下で作業するロボットの基盤技術 / 可変剛性機能を有するグリッパの設計とその制御法)
-
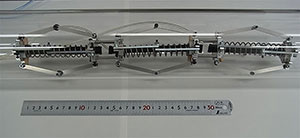
ぜん動運動型管内移動ロボット
社会的活動
日本機械学会 / 精密工学会 / 日本ロボット学会 / 日本IFToMM会議 / 日本設計工学会
2000年度日本ロボット学会論文賞受賞
1996年度精密工学会技術賞受賞
メッセージ
多くのメカトロニクスシステムは、機械を動かす駆動源であるアクチュエータ、機械の状態を計測するセンサとセンサ情報や制御情報を処理しアクチュエータに動作指令を行うコントローラから構成されています。アクチュエータは機械の駆動源であり機械の性能やコストに大きく関与することから、アクチュエータの性能向上および小型軽量化に関する研究は活発に行われています。知的好奇心と豊かな発想力で新しいメカトロニクスを一緒に考えてみませんか。
研究概要
宮川研究室では、新しい機能を有したメカトロニクスの実現を目指してアクチュエータを中心とした高機能デバイスとそれらを用いた先端メカトロニクスシステムの研究に取り組んでいます。具体的に空圧ゴムアクチュエータを用いた手指リハビリ支援装置や狭隘部移動ロボット、差動歯車機構を用いた可変剛性アクチュエータの実現を目指しています。