SDGs関連研究
2022/07/06
持続可能な交通社会をめざす自動運転型パーソナルモビリティの開発
進展の著しい自動運転技術は、人間の身体的能力の程度にかかわらず、あらゆる人間が目的地まで自由に赴くことのできる権利を持続的に提供する手段の一つとなりうるものです。
今回、ラストワンマイル、すなわち1~2 kmの移動をサポートするための自動運転型パーソナルモビリティ(以下、PM)の開発を三咲デザイン合同会社(東京都千代田区)との共同で試みました。本学が埼玉県川口市による「未来技術社会実装事業」(内閣府選定14事業の一つ)に参画した際に開発したPMをベースに、さらなる機能を付加し、本学埼玉キャンパス内を自動運転させることを目標として技術開発を進めました。新たに、障害物までの距離を「面的」に計測するDepthカメラを搭載し、様々な形状の障害物を高い精度で検知して、これを回避するように目的地まで自動走行するアルゴリズムを設計しました。この結果、E21棟から東門駐輪場、学友門、天神門、正門を経由して工業技術博物館までの自動走行を実現しました。
今後は、より複雑な場所での自動走行の検証を進める予定です。
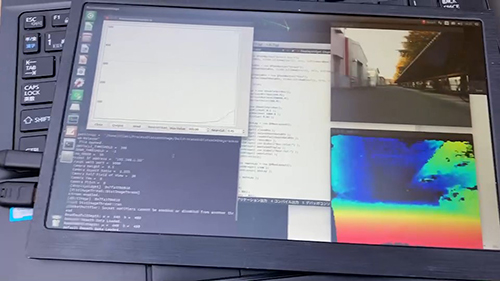
図1:東門駐輪場から学友門に向けて走行した時のDepthカメラ映像(右下)
距離が近い物体ほど赤く表示される

図2:天神門付近の峡路も自動で通過した
先進工学部 ロボティクス学科
鈴木宏典 教授