SDGs関連研究
2022/07/07
ソーラーパネルの見回り点検用飛行ロボットの開発
ソーラーパネルのような構造物の健全性を外側から精査することを目的とするUAVシステムを開発しました。
使用するUAVはPhantom 4 Pro V 2.0です。UAVの前方に2台、左右に1台ずつ、下方に1台搭載したLiDARセンサの測定値をTeensy 4.1で集約してRaspberry Pi 4に伝達しました。次に集約された値から飛行している環境を把握し、その情報をXML-RPCによってUAVに搭載されているRaspberry Pi 4からコントローラに搭載されているRaspberry Pi 4へ伝達しました。コントローラに搭載されているRaspberry Pi 4は、受け取った情報をもとにArduino Nanoにコントローラを制御させることでUAVを操縦する。コントローラはThrottle、Rudder、Pitch、Yawの4つをそれぞれのデジタルポテンショメータの抵抗値に応じて制御しているため、Arduinoはコントローラに4台搭載し、コントローラのそれぞれのコントロールスティックを担当します(図1)。周辺環境の把握には、LiDARセンサを使用しました。LiDARセンサから得られた数値をもとにUAVの周辺環境を判断します。前方2台の搭載しているLiDARセンサから得られた最小値に合わせ、左右の方向転換を行い、検査する対象である壁等に平行に飛行させました(図2)。
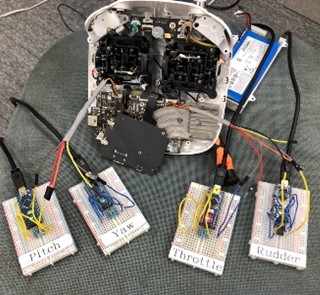
図1:コントローラと制御モジュール

図2:UAVに取り付けたLiDARセンサ
先進工学部 情報メディア工学科
神林靖 准教授