SDGs関連研究
2023/07/18
ドローンによる受粉可能な花弁探索のための群知能アルゴリズムを用いたドローン飛行制御
ミニトマトの受粉は、ハウス内に放したマルハナバチが移動することによって行われています。しかしながら、夏場はハチの活動が低下するため、人手による受粉作業が必要となり、農家にとって受粉作業が負担となります。また、ハチのような生物の管理は難しく、近年では、原因不明のハチの大量死の問題や、ハチの調達は輸入に頼っているためコスト面での課題もあります。
そこで、ハチの代わりに受粉作業を小型ドローンで行う受粉システムの研究開発を進めています。本システムでは、小型ドローンでリアルタイムに撮影した画像を、クラウド上の位置するAIを用いた受粉可否判定装置に入力し、その装置で受粉可能と判断した花びらに対して振動センサーで受粉させることを考えています。
本研究の目的は、ハチの群飛行を模擬して花びらを探索する群知能アルゴリズムを用いた小型ドローンの飛行制御を実現することです。そのために、ドローンのカメラから得た画像または動画から、花弁の輪郭及び重心を求め、その重心の座標値の評価値が最小値となる評価関数を設計しました。シミュレーション評価により、その評価関数によって構築された評価空間情報を用いることで、群知能アルゴリズムの行動規則により制御されるドローンが花びらを高精度に探索可能であることを確認しました。
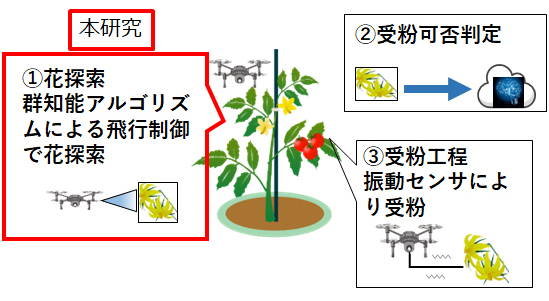
スマート農業システムの概要と本研究の位置付け
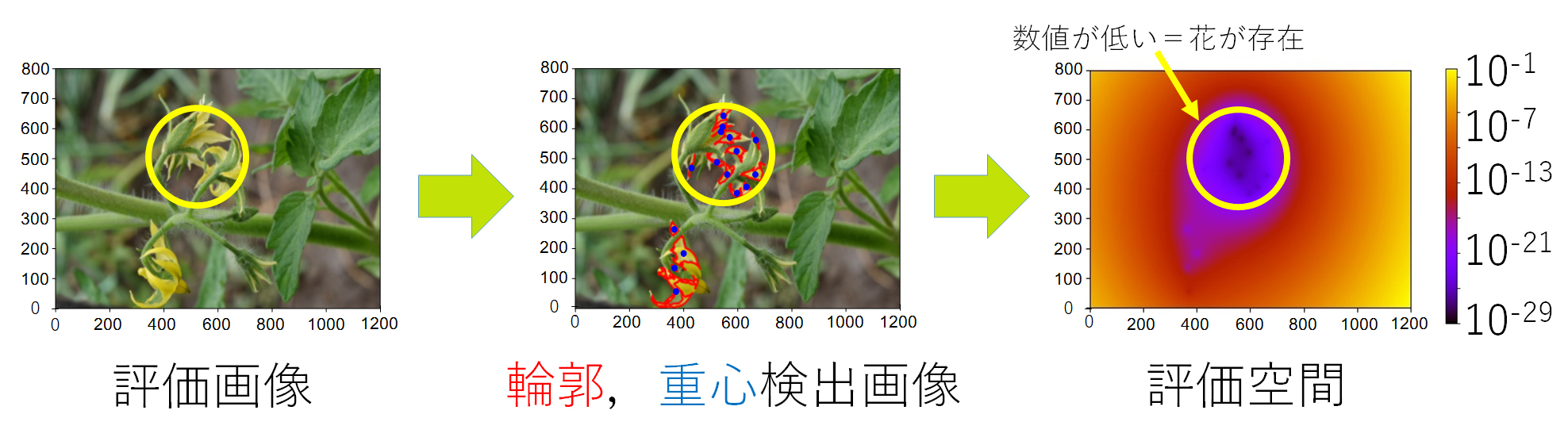
花が存在する座標の評価値が最小値を取るように設計
⇨最小値を探索することで花の座標を特定可能
データサイエンス学科 伊藤暢彦 准教授
◆学生◆
長谷川太悟(電子情報メディア工学専攻)
上山泰生(電子情報メディア工学専攻)