SDGs関連研究
2024/06/13
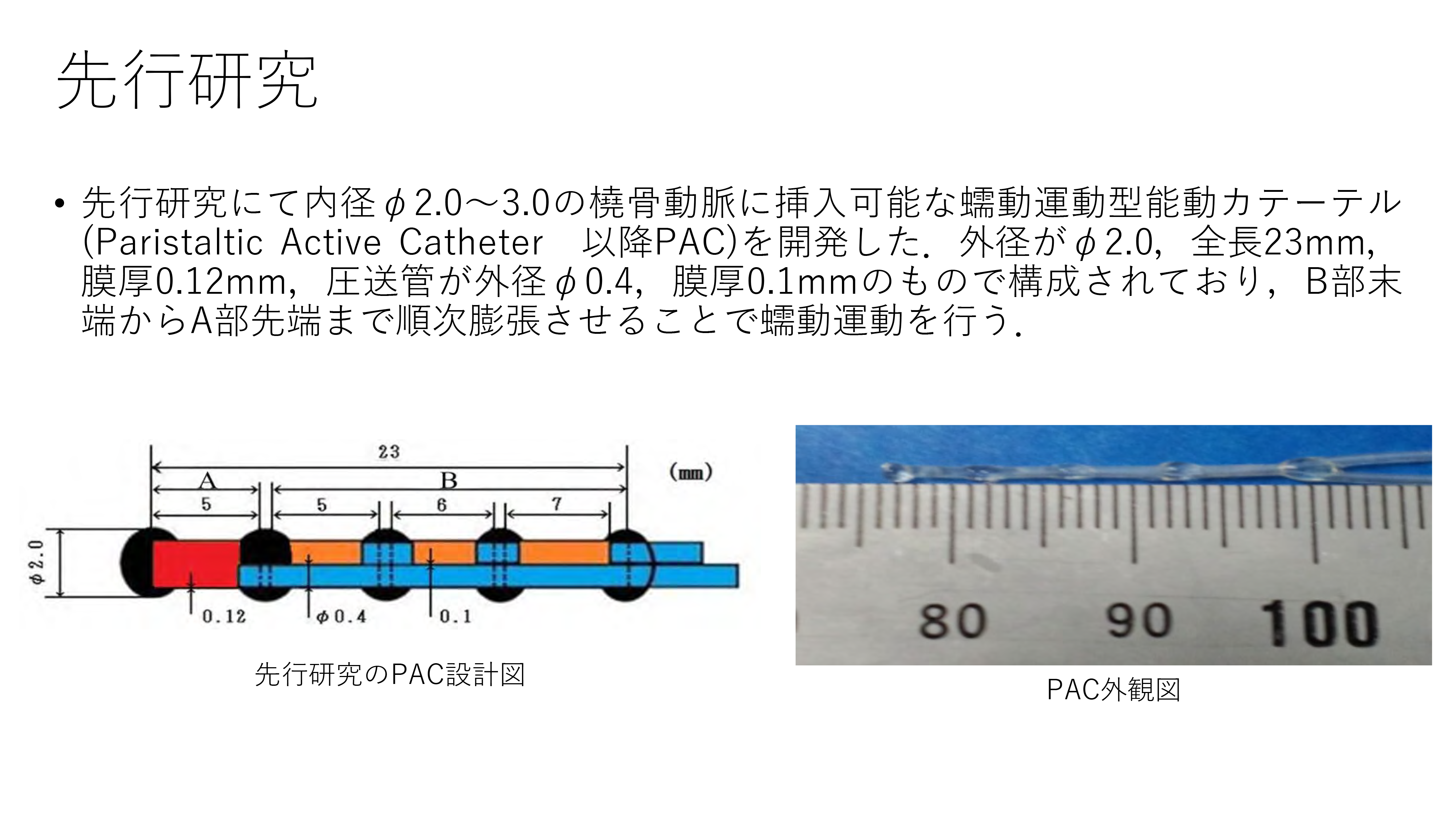
蠕動運動型能動カテーテルの開発
日本人の四大疾病のうち「心疾患」と「脳血管障害」は何らかの原因による血管の閉塞によっておこる病気である。この治療法の一つに、血管内にカテーテルを挿入し、血管の修復を図るカテーテル手術がある。患者の負担が少なく、後遺症も少ない事から近年注目されていますが、医師の技量によるところが大きく、効率化・自動化が望まれている。申請研究では血管内を自走できる蠕動運動型能動カテーテル(Peristaltic Active Catheter以降 PAC)を開発する事でこの問題の解決を目指す。「SDGs3 すべての人に健康と福祉を」に対応する研究となる。
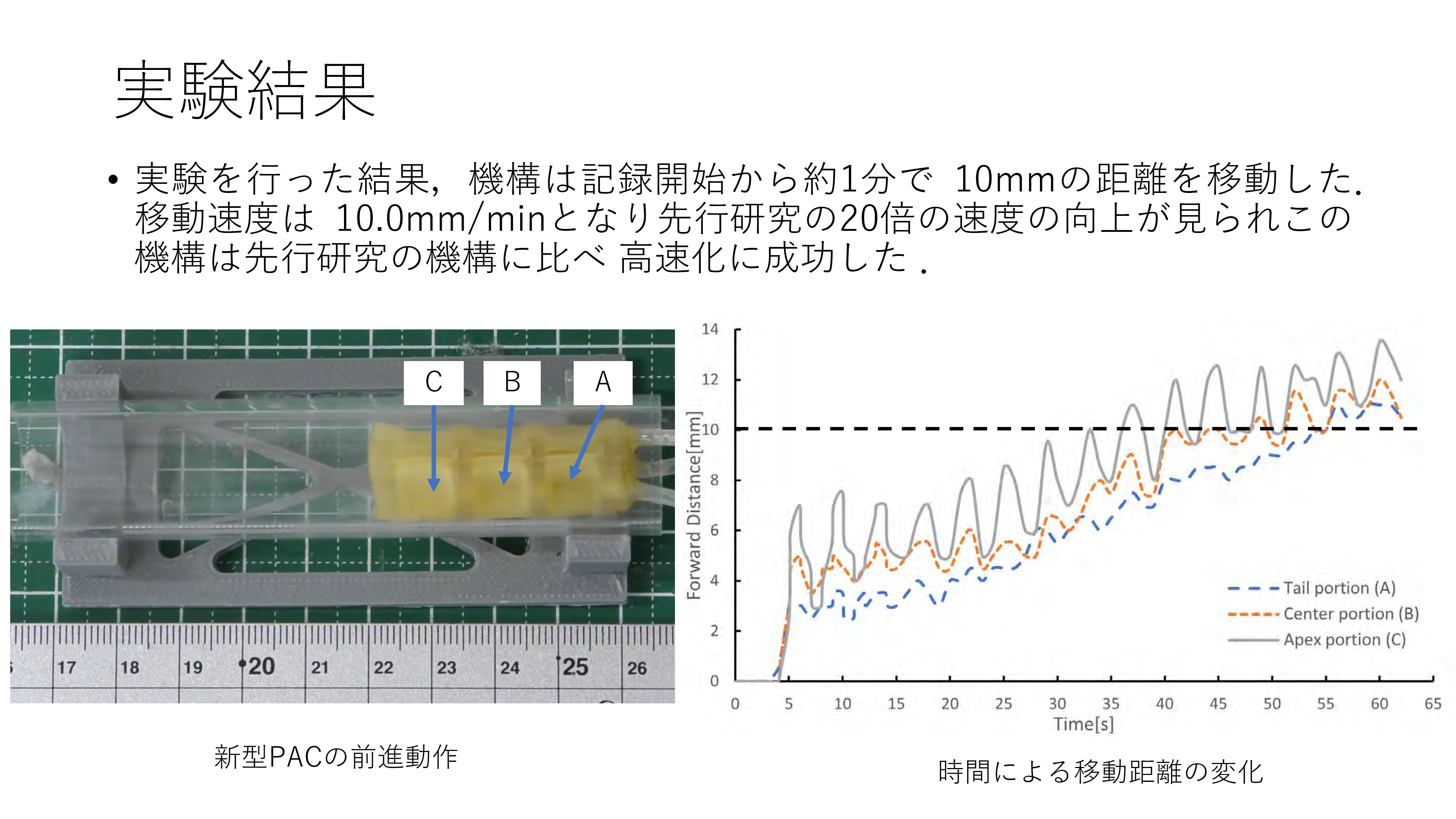
研究ではPAC作製のため、超軟性造形対応光造形3Dプリンタを使用する。この3Dプリンタはコーター方式と呼ばれる特殊な方式を採用するため、耳たぶのような柔らかさ(ショアA2 ゴムライク樹脂)の造形が可能である。この造形物は単に柔らかいだけでなく弾性があり伸び縮みする事が可能なため、既に幾つかの先行研究でソフトアクチュエータの構成材料として使用されている。本研究では直径数mmのカテーテルを複数の節に分けて製造し、後端から水圧を加える事でこれらの節を順次膨張・収縮を行わせて進行波を生成し、蠕動運動が可能な一連のシステムを開発した。しかしながら、造形ステージに対して水平方向の面と吊り下がりで積層される垂直方向の面に違いが生じるなど、この方式独特の課題も存在し、造形ノウハウの知見が不足している。そこで、本研究ではこの造形方法に適した蠕動運動型能動カテーテルを専用設計し、FEM解析等を用いて蠕動運動型能動カテーテルの形状を検討した。実際に超軟性造形対応光造形3Dプリンタを用いて実機の作製を行いながらその最適パラメータを模索した。その結果、全長42mm、外径φ15mmのPACの作製に成功し、移動速度0.16mm/sの管内移動を確認した。

ロボティクス学科 中里裕一 教授
◆研究期間
2023年5月16日~2024年3月31日
◆担当教員
ロボティクス学科 中里裕一 教授
◆学生
機械システム工学専攻大学院生1名、ロボティクス学科次世代ロボット研究室3、4年生1~2名