SDGs関連研究
2025/06/13
ドローンと車両を用いた配送路最適化手法の開発
円安に伴う配送車運用費の増加の背景などから、少数ドライバーでの短時間の配送により人件費や維持費を含めたコストを削減する、効率的な配送路の構築手法の開発が急務となっている。本研究室では、非線形力学系理論を基盤とした強靭な次世代物流システムの構築の開発を目的とした研究を進めている。この達成のために本研究課題では、近年、組合せ最適化問題における新たな問題として定義された、運搬車両とドローンを用いた配送計画問題に対して、決定論的カオスを用いた配送路構築手法を提案した。この手法は、決定論的カオス性の持つ豊富な時空間構造を活用し、種々の情報を効率的に保存することで、短時間でコストを抑える配送路の構築が可能となる。また、本手法は、計算量が少なく、かつ多様な環境における経路最適化に柔軟に対応可能である。数値実験から、顧客数が200程度の少数顧客の問題に対して、従来の配送路構築手法と同程度の性能を維持しつつ、計算時間を短縮できることを確認した。今後は、顧客数が1、000以上の大規模顧客問題における数値実験を進め、提案手法の性能を多角的に評価する予定である。
-
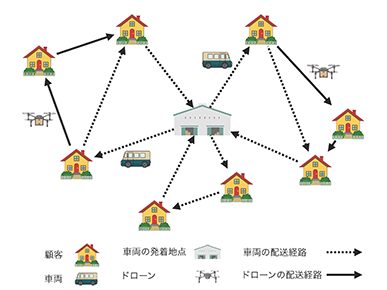
車両とドローンを活用した配送経路の一例 -
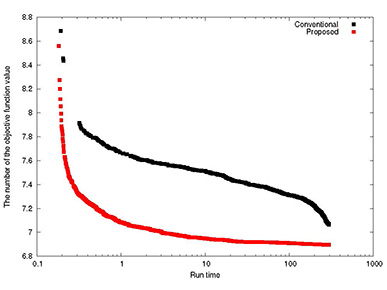
従来手法(黒色)と提案手法(赤色)の性能比較図
◆研究期間
2024年6月1日~2025年3月31日
◆担当教員
電気電子通信工学科 木村貴幸 教授
◆学生
稲葉賢駿、仲島和真(電子情報メディア工学専攻2年)
小竹望未(電子情報メディア工学専攻1年)
仲野壮、仲沢綾夏(電気電子通信工学科4年)
高瀬柊哉、西野龍太朗(電気電子通信工学科3年)