教員一覧(学科、施設別)教員紹介
基幹工学部 機械工学科
准教授/石川貴一朗 [制御システム]

プロフィール
2009年~2010年 日本学術振興会特別研究員 DC2
2010年 早稲田大学大学院 機械工学専攻 博士課程修了 博士(工学)
2010年~2012年 早稲田大学 理工学術院総合研究所 助手
2012年~2013年3月 早稲田大学 基幹理工学部機械科学航空学科 助教
2013年4月~2016年9月 日本工業大学 助教
2016年10月~ 日本工業大学 准教授
2017年~ 一般社団法人 ドローン測量教育研究機構 理事
専門
移動測量、自律移動システム、制御工学
研究テーマ
建設機械の自動化
自律移動システム
3次元点群に関する研究
受賞履歴
・精密工学会 2023年度秋季大会 ベストオーガナイザー賞(2023年)
・令和5年度 日本建設機械施工大賞 大賞部門 優秀賞(2023年)
・令和4年度 建設施工と建設機械シンポジウム 論文賞(2022年)
・計測自動制御学会 SI部門 技術業績賞(2010年)
・精密工学会ベストプレゼンテーション賞(2010年)
・ロボティクスメカトロニクス講演会ベストプレゼンテーション表彰(2009年)
・ロボティクスメカトロニクス講演会ベストプレゼンテーション表彰(2008年)
・第13回ロボティクスシンポジア 優秀論文賞(2008年)
・計測自動制御学会 論文賞(友田賞)(2006年)
・日本機械学会 フェロー賞(若手優秀講演)(2006年)
・日本機械学会 三浦賞(2005年)
・ロボット実用化技術賞(2005年)
・IEEE SSRR2005 Best Paper Award(2005年)
社会的活動
計測自動制御学会,日本機械学会,精密工学会
精密工学会 大規模環境の3次元計測と認識・モデル化技術専門委員会 幹事

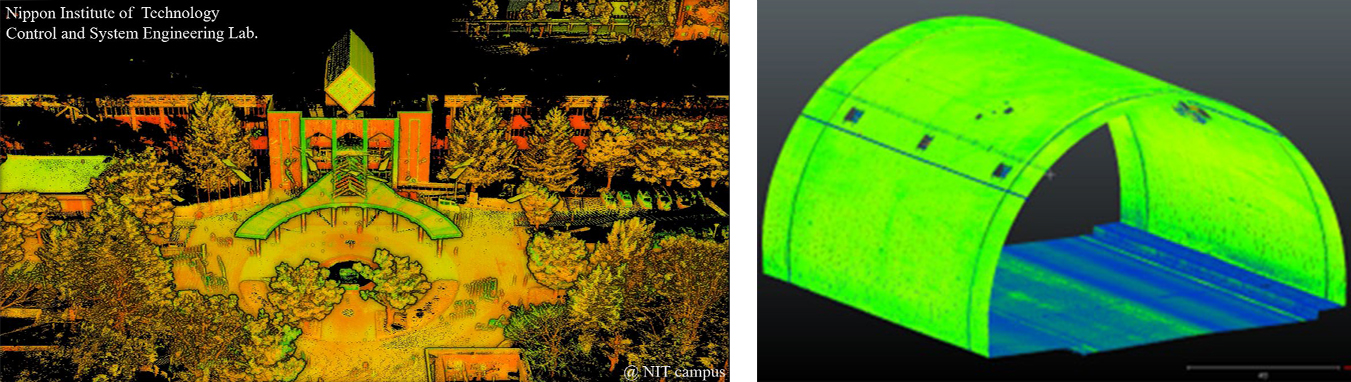
計測車両で取得した3次元データ
メッセージ
本研究室では、社会ニーズに対応するために、様々なシステムを組み合わせて新たなシステムを作り上げる研究などを行っています。このような研究・開発では、一見すると関係ないと思いがちな知識が思わぬところで役に立つこともあります。本研究室では、機械工学分野に限らず他分野も含めた技術交流を通して、分野を横断した広範な知識を持ち物事を柔軟に捉えることができる人材育成を目指しています。
研究概要
・自律移動ロボット
ロボットが現在位置から目的地まで人が介入することなく、安全に移動するために必要とされる技術の研究をしています。これらの技術には、経路計画、環境認識、自己位置推定、制御技術などが含まれています。

・建設機械の自動化
今後、日本では熟練技術者が減ることが予想されており、人材が不足してきています。本研究室では、自律移動ロボットで得た知見を活かして、建設機械を自動化し土木施工を自動化する研究を行っています。研究では建設機械のシミュレータを開発したうえで、シミュレータ内で自動施工システムを構築しています。構築したシステムは本物の建設機械に移植し、実際の現場で実機実証する研究を行っています。
(詳細は https://jcmanet.or.jp/bunken/symposium/2022/ronbun36.pdf)
・3次元点群に関する研究
自律移動ロボットの技術を利用して、3次元点群地図を生成する技術や、LiDARと呼ばれるセンサで計測した3次元点群をリアルタイムで解析して、物体の認識や、移動体追従などを行う解析処理技術や、計測した3次元点群からインフラ設備の維持管理を行うための研究を行っています。