基幹工学部機械工学科
- 学科SNS
 instagram
instagram
研究室紹介

レーザースキャナやデジタルカメラを搭載した車両を走らせて3D 地図をつくるモバイルマッピング。老朽化したインフラの点検や災害被災地の状況把握などでの活躍が期待されています。この計測システムの構築を通じて、機械工学、情報工学、電気工学などの幅広い知識の修得をめざします。
主な研究紹介
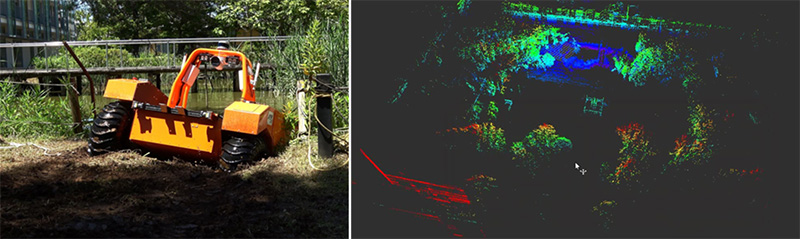
水陸両用不整地移動計測システムの開発
空間の三次元計測は、老朽化したインフラ設備の点検や三次元地図構築など様々な所で応用が期待されています。本研究室では、従来の計測機では簡単には進入できなかった場所や、人が立ち入ると危険な場所で自動的に三次元計測を行うシステムの開発をしています。下図は、水陸両用車を使って、池に進入し計測をしている様子と、計測結果を表しています。
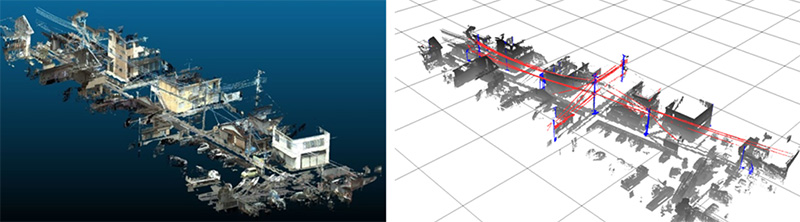
大規模環境の三次元点群からの物体認識に関する研究
3次元レーザスキャナやMMS(Mobile Mapping System)などを使うと、下左図のような三次元の点群情報を得ることができます。この点群は、取得しただけでは、それぞれの属性が不明なため、物体の種別分けをすることができません。本研究室では、AI技術を使い、1000万点を超える点群の中から特定の物体を効率よく認識する手法について研究しています。下右図は左図の中から、架線と電柱を自動で認識した結果を示しています。
自律移動システムに関する研究
自動運転などに代表される自律移動システムを対象として、そのシステムに必要となる経路計画、位置推定、物体認識などの各技術に関連した研究を行っています。研究室では毎年つくばチャレンジという実験走行会に参加し、人が行き交う中でシステムを動かす実証実験を行っています。写真は、研究室で学生達がゼロから開発した車両です。
