基幹工学部電気情報工学科
研究室紹介
コンピュータとディジタル技術を高度に活用して、人々の状況とその周囲状況とを把握することで、人とコンピュータシステムが相互に理解し、協調して行動し、共に助け合って、より安全・安心で豊かな生活を創ることを目指しています。自動運転、生活空間ロボット、IoT(モノのインターネット)など、最先端の課題解決に必要不可欠な、コンピュータが状況を的確に把握する技術として「状態推定」や「情報融合」があり、その工学応用における最先端をリードしています。各種のデモンストレーションシステムを開発して一般公開しており、それを支えるソフトウエア、ディジタル、ネットワーク、センサ情報などの基盤技術を幅広く活用しつつ、先端的な方法論として人工知能、機械学習、ソフトコンピューティングなども取り込みながら、これらを包括的に学び、個々の具体的な研究テーマに取り組んでいます。国内外の大学との連携、企業との共同研究も推進しています。
キーワード:
コンピュータ、ソフトウエア、システム化技術
ディジタル技術、FPGA、組み込みMPU
ネットワーク通信、並列分散計算
センサ信号からの情報抽出
状態推定、情報融合技術
人工知能、機械学習、ソフトコンピューティング
主な研究紹介
わかりあう:運転者の状況を考慮した安全運転支援
人と機械(コンピュータシステムなど)との相互理解による豊かな社会の実現のひとつとして、自動車運転における安全運転支援に着目し、周囲の交通状況だけでなく、運転者や搭乗者の状況(挙動や姿勢、意図、心理など)を考慮することを目指しています。これらのいわゆるヒューマンファクタは、運転という人と車が協調する作業で、例えば自動運転から手動運転への切り替えなどにおいても、重要な要素です。実験設備として、運転シミュレータ装置2台を活用し、運転者の挙動や意図などを実時間で把握するシステムを構築して、その公開デモンストレーションも行っています。52インチ大型3画面を持つ運転シミュレータ装置は、展示ホールに常設展示しています。今後は実車での実験も視野に入れて、さらに研究を進める予定です。

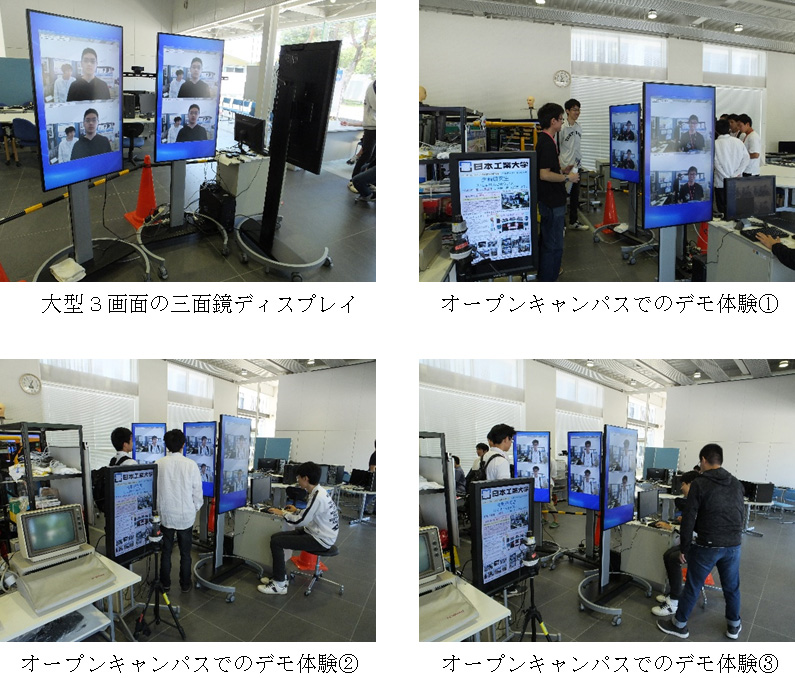
たのしむ:動く被写体の実時間装飾アミューズメント
人とコンピュータシステムとの対話(インタラクション)により、人の感性をコンピュータシステムが理解し、人と共に楽しむことのできるアミューズメント創出を目指しています。カメラの前で動く被写体(人)の顔を美しくする画像処理として、目を大きくし、肌を美白にするなど、動きのある中で実時間で装飾行うデモンストレーションシステムを公開しています。更に発展的な課題として、顔にかぎらず全身の装飾や、服などの仮想的な試着、トレーニング成果の疑似体験など、様々なテーマでの研究とシステム開発が可能な設備を導入し運用しています。大型3画面の三面鏡のようなディスプレイとタブレットPC、深度カメラやレーザ距離センサなどを装備しています。今後はバーチャルリアリティ装置なども導入していく予定です。
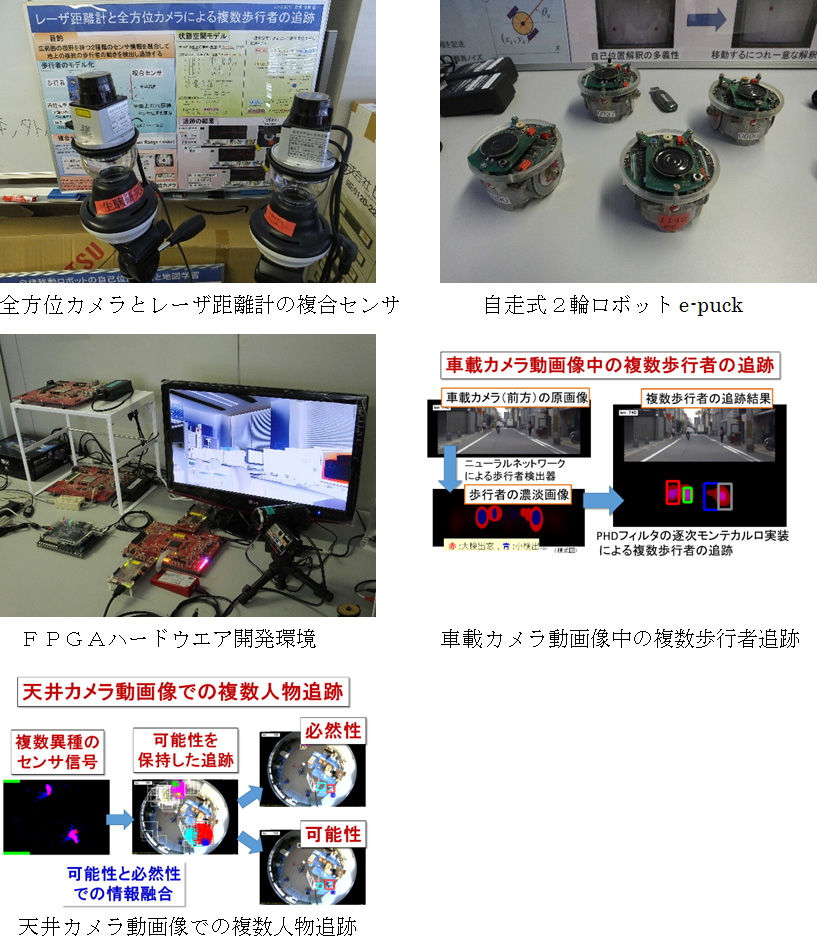
たすけあう:複数異種センサ情報の融合と複雑シーン把握
IoT(モノのインターネット)が最先端の話題として注目されている中で、ネットワーク接続された多数の異なるセンサから得られた信号や情報を融合して、私たちの日常生活で生じる複雑なシーンの状況を把握することは、今後ますます重要になってくる研究テーマです。そこで活躍するのは、センサ信号から情報を抽出し、複数センサの情報を統合融合して全体像を把握する「状態推定」の方法論です。その基盤技術としてカルマンフィルタやパーティクルフィルタと呼ばれる最適フィルタ技術があり、先端的な方法として複数対象を同時追跡するPHD(Probabiliry Hypothesis Density:確率仮説密度)フィルタやLMB(Labeled Multi-Bernoulli)フィルタなどがあります。これらの状態推定技術の工学応用において国内屈指の研究を進めています。実験設備しては、全方位カメラとレーザ距離計を複合したセンサ、ネットワークカメラ、深度カメラ、自走式2輪ロボットe-puckおよびRoombaなどを活用中で、今後はドローンや人型ロボットなども導入して設備を充実し、より魅力的なシナリオでの実験を進めていく予定です。