先進工学部ロボティクス学科
研究室紹介
機構設計・高機能要素・システム化をベースにしたメカトロ開発

本研究室では、安全・安心な社会の継続を支える人の役に立つ機械の創出を目指すことを研究の柱として、①特殊環境下で作業するロボットの基盤技術、②可変剛性機能を有するアクチュエータシステムの研究、③ヒューマンメカトロニクス機器の設計とその制御法の3つの研究を行っています。テーマのベースには、高機能な機能要素を創出する「機構」および「要素」の設計技術とそれらを統合する「システム化技術」が共通な部分となっています。新しいロボット機構とその要素、制御手法の設計・試作、人体の運動特性解析と福祉機械の設計・試作など、学生が積極的に研究を行っています。そして研究室のモットーは、「よく遊び、よく学ぶ」です。知的好奇心と豊かな発想力で新しいメカトロニクスを考えてみたい学生の来研を歓迎します。
主な研究紹介
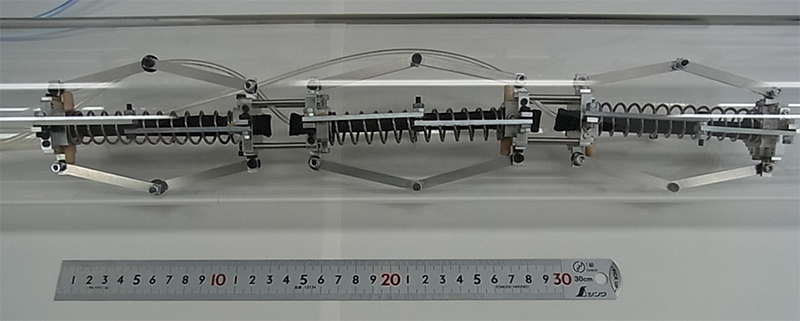
管径変化に適用可能なぜん動運動型管内移動ロボット
多様な管内(垂直、曲管、分岐管)や狭隘部を移動できる管内移動ロボットの移動機構を、昆虫を模範にして新たな移動機構の研究を行っています。
可変剛性機能を有するアクチュエータシステム
認知症改善効果が見込まれる「アニマルセラピー」をロボットで代行する研究が各研究機関で提案されて久しい。しかし、飽きられやすいなどの欠点が指摘され、決定的な解決策をまだ見ていません。本ロボットは、二足歩行するクマのぬいぐるみを作製し「アニマルセラピー」と「回想療法」を兼ね備えたロボットの開発を行い、介護現場におけるロボット技術の活用を目指しています。
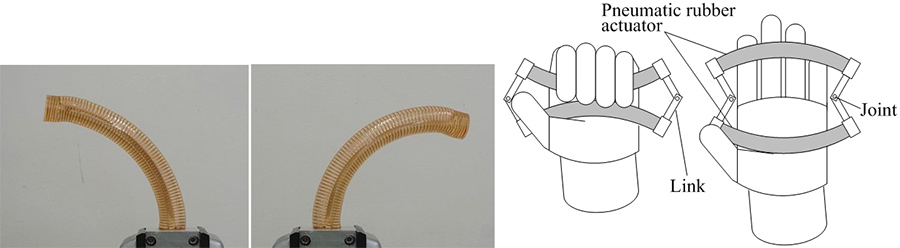
ヒューマンメカトロニクス機器の設計とその制御法
脳卒中による運動機能障害をもった患者に対して運動機能を反復運動で回復させるリハビリ機器として、湾曲型空圧ゴムアクチュエータを用いた手指伸展動作支援装置の研究を行っています。介護現場におけるロボット技術の活用を目指しています。