先進工学部ロボティクス学科
研究室紹介
ひとを幸せにするものづくり
樋口研究室では、「ひとを幸せにする」ものづくりを目標にしています。そして、ひとを幸せにするためには、一つだけものをつくるのでは意味が無く、多くのひとが簡単に同じものを手にすることが出来る必要があると考え、誰もが簡単に同じものをつくれる、そのつくり方、つまり設計方法を提案することを目的としています。
つくる対象は限定していませんが、メカニズムに重点を置いています。これは、ベースになるメカニズムが最終的な性能を決めると考えているからです。例えば、トラックをどんなに改造してもレーシングカーにレースで勝つことが難しいように、最初のメカニズムの性能が悪いものは、どんなに改造や調整を加えても、コンピュータによる知能化や制御を行っても、性能の限界が低いと考えているからです。
そして、教育方針として実際の作業に重点を置いています。これは、実際のものづくりは、理論的に明らかとなっていることだけで設計を行うことはできず、設計者のセンスにより多くの部分を決める必要があり、最終的な性能もこの部分の影響が非常に大きいと考えているからです。そして、このセンスは天性のものではなく、数式に表すことが難しい「ものづくりの経験」だと考えています。そのため、このセンスを身に付ける為に、失敗を恐れずにまずはつくること、そして、上手くいかなくても決してあきらめないで、繰り返しチャレンジするように指導しています。
実際の作業としては、3DCADを用いてコンピュータ上にものをつくりあげてシミュレーションをしたり、コンピュータによる自動制御で部品の加工ができるCNC加工機を用いた部品の製作や組み立てをしたり、最終的にはコンピュータを用いてつくったメカニズムを制御し、性能評価をします。
これらは、企業でのものづくりと全く同じプロセスですので、これらの作業を通じて現場で即戦力となる人材を育成することも目標としています。
主な研究紹介
パラレル機構を用いたスキルアシストシステム
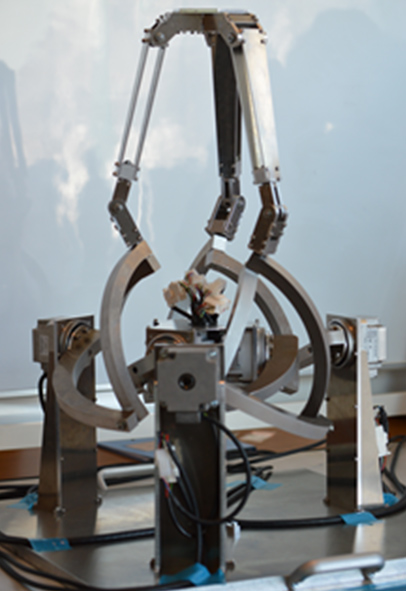
ひとは繊細な感覚、優れた感性、予測不可能な状況に対する高い適応能力をもっています。これに対し、ロボットは、高い運動精度、大きな発生力、高速な計算能力をもっています。そこで、このロボットによりひとの作業をアシストすることで、ひとだけでも、また、ロボットだけでも実現が困難な、高度なスキルを必要とする作業を実現することを考えています。そして、これを実現するためのロボットシステムをスキルアシストシステムと呼び、その具体的な装置として、複数の腕で出力を支える構造のパラレル機構を開発しています。
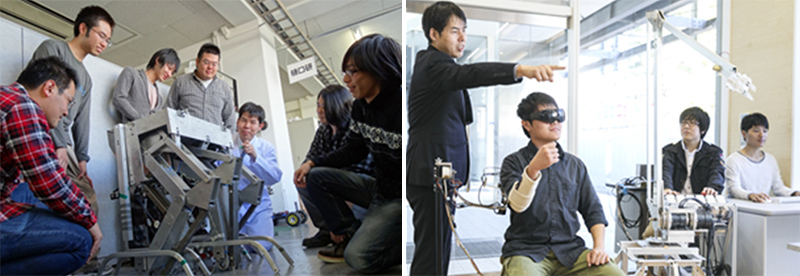
極限作業用4足歩行ロボット
災害現場や原子力発電所内のようなひとによる作業が困難な場所で、ひとに代わって作業するどのような目的にも対応できるロボットの下半身(足)にすることを目的とした4足歩行ロボットを開発しています。高い移動効率と、高い対地適応性の両立が困難な性能を、環境に合わせて変形することで実現するロボットを開発しています。また、簡単に分解・合体ができる構造とすることで、作業現場への運搬、故障時の修理、作業に合わせた部品の交換が簡単に行えるようになっています。

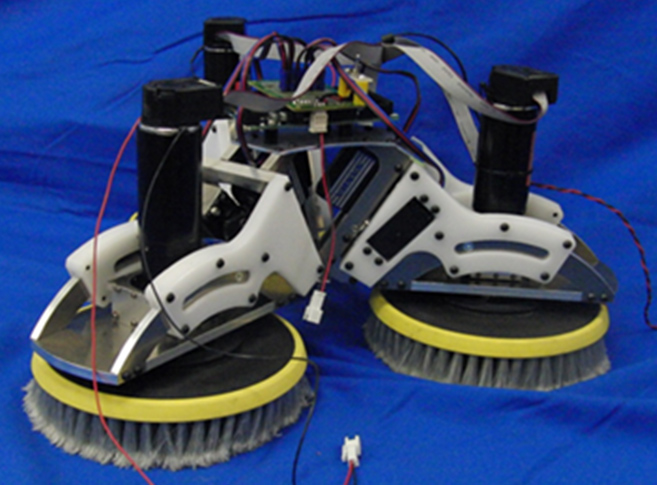
自走洗浄ロボット
除染作業や屋根の掃除のような人が行うには危険な洗浄作業や、風呂・ベランダのような狭い場所での洗浄作業を行うことを目的とした、自走洗浄ロボットを開発しています。動力に洗浄のための水の圧力を用いることで、本体に大きなバッテリーや電磁モータを搭載する必要が無いため、小形・軽量なロボットを実現できています。また、より自由な運動と強力な洗浄を行うために、ブラシの数を3つにしたロボットを開発しています。