先進工学部ロボティクス学科
研究室紹介
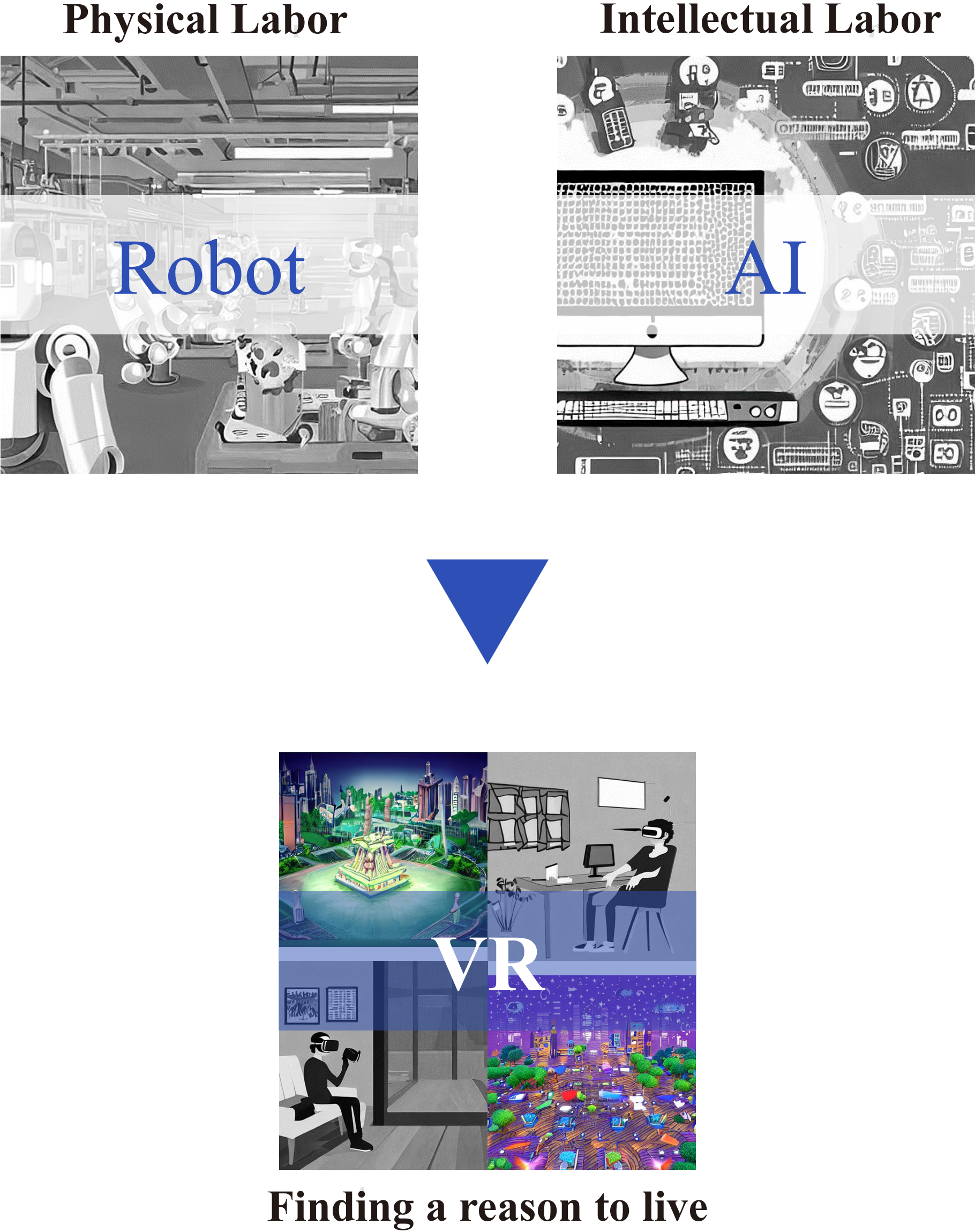
コンピュータの処理速度の向上に伴い、AI(人工知能)、ロボティクス、VR(バーチャルリアリティ)などの技術が急速に進展しています。このまま技術の発展が続くと、社会生活での知的労働はAIに、肉体労働はロボットに置き換わり、人間はVRを活用して別の世界でやりがいを見出すようになるかもしれません。そうなると、もはやこの世界の真実性が問われることになります。つまり、「現世界はコンピュータでシミュレートされた世界なのではないだろうか?」という疑問が生じるのです。この疑問はシミュレーション仮説として知られています。
本研究室では,多くの方が幼少期に抱くであろうこの疑問を、工学や情報学の技術,認知科学や心理学などの知見を駆使し、人工世界を実装することで検証していきます。人工世界の実装には、①人工世界の生成、②人工世界への接続、③人工世界での生存という3つの研究領域が広がっていると考えています。そこで,特に②・③を中心に研究を進めていきます。②では、人工世界に接続する技術として、実身体での運動を必要としないバーチャルリアリティ(Motion-Less VR)の開発を行っています。③では、人工世界での生存に関連する要素として、時間感覚や身体図式の制御・解明に関して検討していきます。
主な研究紹介
Motion-Less VRの研究
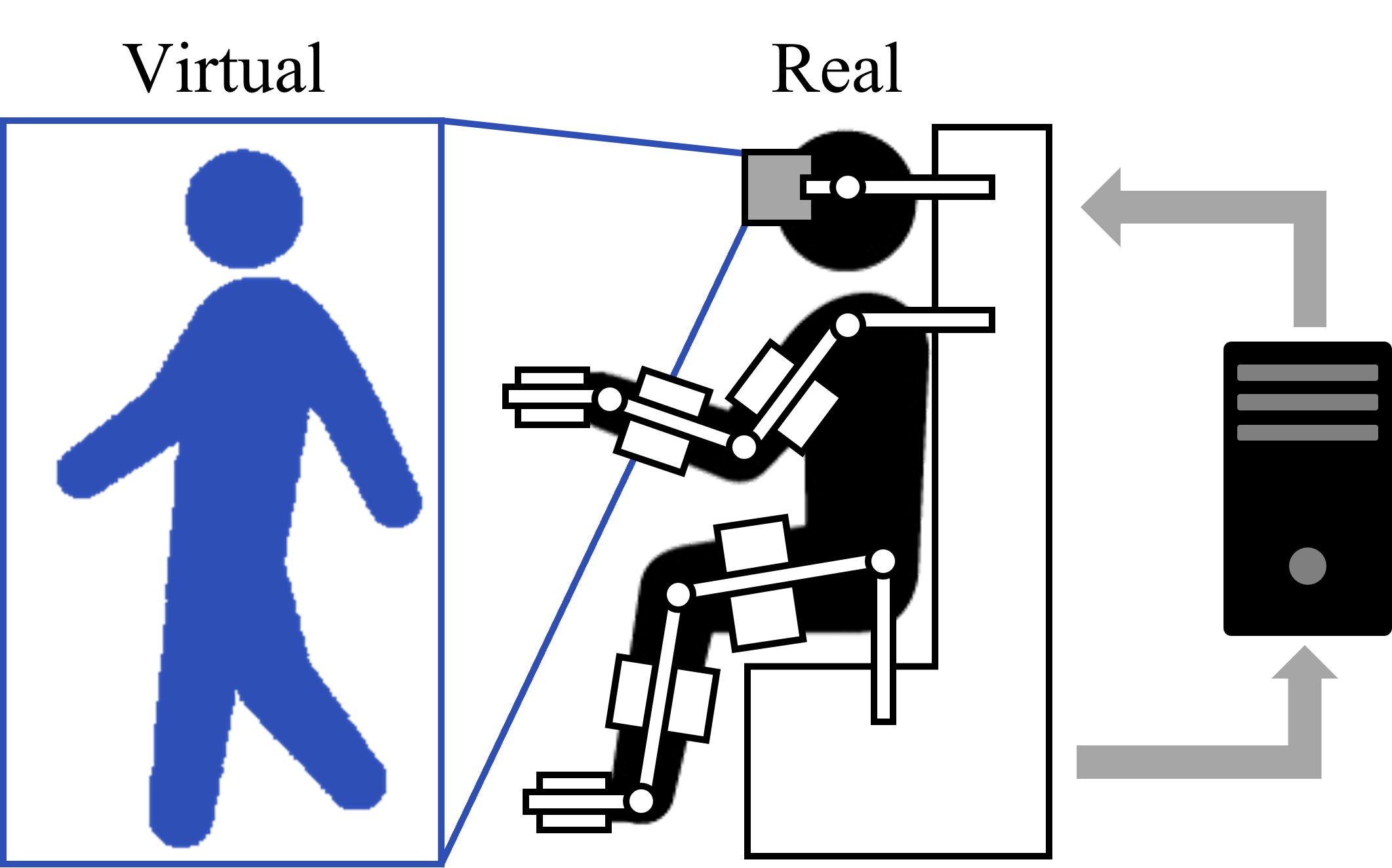
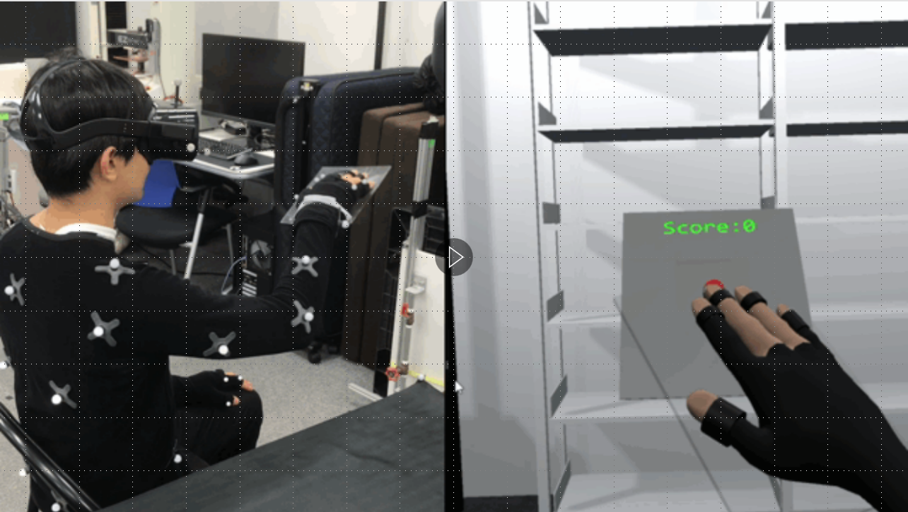
現行のVRシステムでは、モーションキャプチャを用いてリアル身体の運動そのものをバーチャル身体の動きとする方式が採用されています。しかしこの場合、移動可能なバーチャル空間の範囲がリアル空間の広さに依存することになり、またバーチャル身体で表現可能な動きはリアル身体で実行可能なものに限定されてしまいます。そこで、リアル身体の運動を抑制した状態において、運動の意図のみを正確に取得し、さらに運動している感覚を可能な限り与えることによって、リアル身体の運動を伴わないバーチャルリアリティ(Motion-Less VR)の実現を目指しています。
-
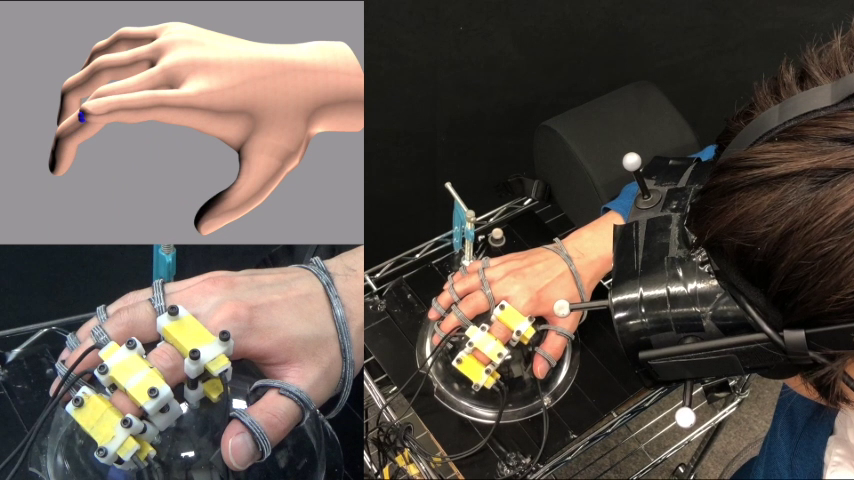
示指の屈伸運動を実現するMotion-Less VRシステム -
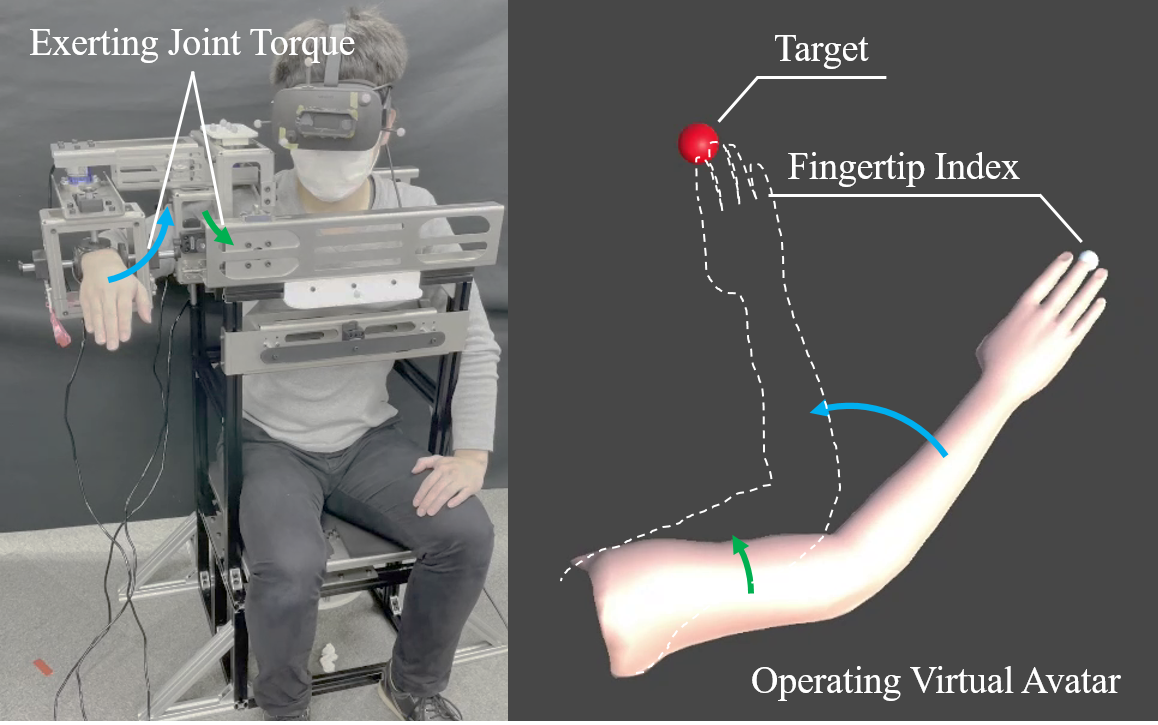
肩肘の水平運動を実現するMotion-Less VRシステム
電気味覚の研究
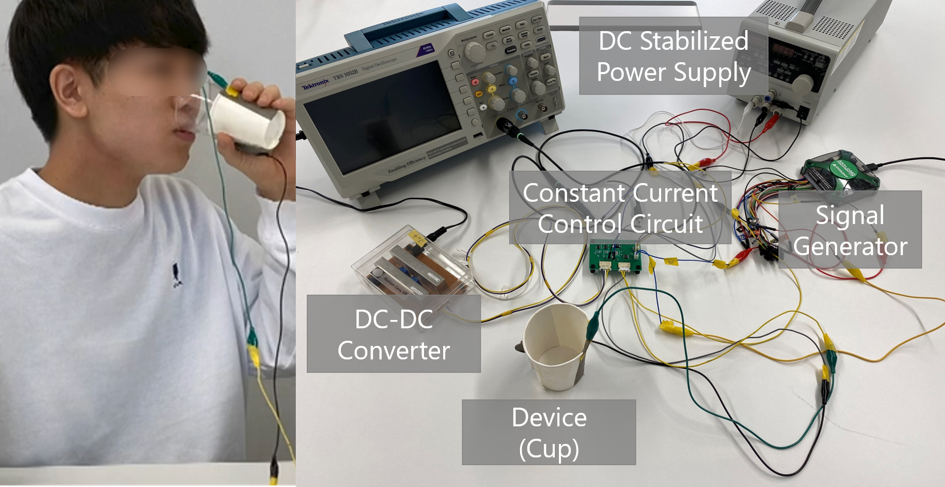
味覚は未解明な部分が多い感覚器です。近年では、電気を用いて味覚を提示する・変化させるといった研究が盛んに行われています。電気により人工的に味覚知覚・飲食体験を作り出し、自由に制御することができれば、日常生活におけるQOL(Quality of Life)の向上や、人工世界における現実感の向上に繋がります。そこで、電気刺激により塩味を増強させる研究や、炭酸飲料の炭酸感を増幅させる研究に取り組んでいます。
身体図式の研究
通常、リアルの身体は特に意識せずに自由に動かすことができていますが、バーチャルな身体を操作する場合には、その形状が自身と異なることによって、操作性が低下してしまうといった問題が起こり得ます。そこで、この問題の根本的な原因が「身体図式」と呼ばれる身体形状を記憶している脳内モデルの乖離にあると考え、その学習メカニズムに基づき、通常の身体に最適化されている身体図式をバーチャル身体の形状に適合させる手法を提案し、有効性の検証を進めています。本手法の確立により、遠隔コミュニケーションや遠隔ロボットの没入操作による医療・災害支援など、バーチャルリアリティを使ったシステム・サービスの高度化が期待されます。