先進工学部ロボティクス学科
研究室紹介
次世代ロボットの研究・開発

本研究室では主としてロボットビジョン(Robot Vision) / コンピュータビジョン(Computer Vision:CV)を実現するための研究を行っています。コンピュータビジョンとは、コンピュータによって実現される視覚機能のことで、その最終目標は人間の有する視覚と同等の視覚機能の実現です。ロボットビジョンはコンピュータビジョンの中でもロボットの周辺知覚に用いられるための分野で、リアルタイム性やロバスト性を実現しなければならないなど、ロボットの機能上必要な特徴を実現する必要もあります。こうした目標に向けて、カメラやセンサなどの撮像系から得たデジタル画像データを解析して、撮像された物体の認識処理や画像データから得られる情報に基づいた計測技術の確立など個別の研究テーマを研究しています。最近では技術の進展が急速にすすんでいるディープラーニングなどの機械学習手法を取り込み、仮想現実(VR)・拡張現実(AR)・複合現実(MR)への応用も進めています。
主な研究紹介
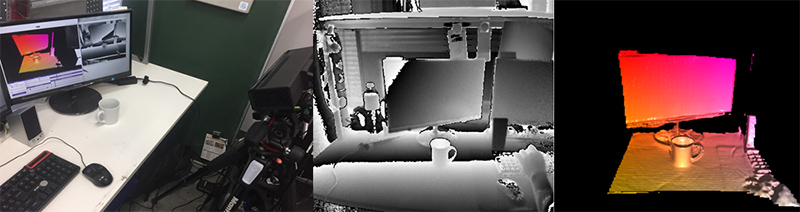
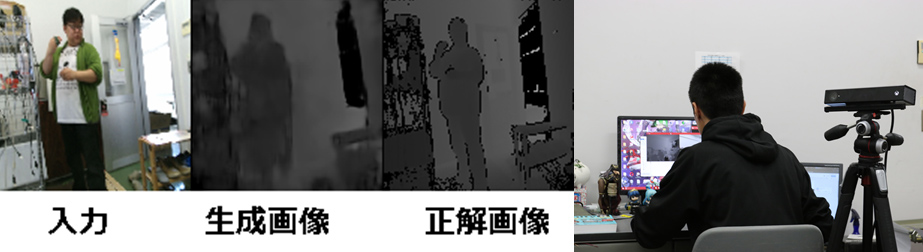
機械学習による撮影画像からの距離画像合成
この研究はマイクロソフト社のKinectのようなRGB-Dカメラで撮影できる距離画像を、通常のRGBカメラだけで人工知能により再現する研究です。スマートフォンには基本的に普通のRGBカメラしか搭載されておらず、撮影した写真を3D的に奥行き回転させたりはできません。そのためには距離を測るKinectのような距離センサが別途必要になります。しかし、現在の人工知能技術では、イラストから写実的な画像を合成したり、画像の一部が欠損したところを自然に修復したりする技術が開発されています。ここでは、距離センサを用いずにただのカラー写真から距離画像を合成して再現することを研究しています。これにより、スマートフォンで撮影した写真を3Dの写真のように利用することができます。本研究では距離画像を合成する部分にディープラーニングを用いています。
運用効率の向上を目的としたVRを用いた教室システムの提案
現在の教室運用の問題として教室数の不足が挙げられています。今まで各講義で別教室を用意する必要がありましたが、この研究ではVR(仮想現実)を使用することで一つの大規模な教室で複数の講義を同時に行うことができるようになります。これにより仮想空間で効率よく教室の運用を目指します。それ以外にも空間を自由に生成することができるため、3D空間を自由に使用して理解を深める実験や演習や、バラバラの座席に座ってもネットワーク上で円卓を囲みゼミなど、また,どの座席に座っても常に最前列で講義を受講することができるなどの様々なメリットが生まれます。

液体容器の内容量の画像計測とARによる作業支援
画像計測とは、カメラやセンサによって撮影された画像を元に被写体の長さや大きさ重さ、色合いなどを非接触で計測するための研究です。その研究の一つとして、例えば実験や料理など液体を扱う作業でコップや鍋といった容器に対して計量カップのように液体の投与量を可視化することができます。Kinectを用いて容器の内側に目盛を表示するようなAR(拡張現実)を用いた作業支援を行えば、実験や料理などの作業が円滑に行えるようになります。この研究ではKinectに搭載されている距離センサによって容器の形状を取得し、最大容量を計算して数ミリリットルごとに目盛を、実際の容器に重ね合わせて拡張表示することを目指しています。