先進工学部ロボティクス学科
研究室紹介
滝田研究室では、ITとロボットテクノロジ(RT)を中心に様々な工学分野を融合させ、IRTコンポーネント・レスキューロボット・知能ロボットなど人の役に立つシステムの研究・開発を行います。開発した装置の実用化も積極的に検討していきます。
主な研究紹介
IRTコンポーネント
ロボットを動かすためには、制御システムを作らなければなりません。その制御システムを構成する部品がIRTコンポーネントです。IRTコンポーネントには、マイコンやPCなどの計算機、モータを動かすためのモータドライバ、ジャイロやカメラなどのセンサ、電源など様々な要素が含まれます。アプリケーションに合わせたIRTコンポーネント自体やその組み合わせについて研究します。

知能ロボット
未知の環境を探索しながら進むロボット、自分で歩き方を学習するロボットなど様々な知能ロボットがあります。完全な人工知能はまだ完成していません。だから、完全に自律的に動くロボットというのも、まだできません。しかし、限られた状況に対応できる知能でも、そのような状況で動くロボットを操作するのがずっと簡単になります。そのような、人間と協力して人のために仕事をする知能ロボットの仕組みについて研究します。
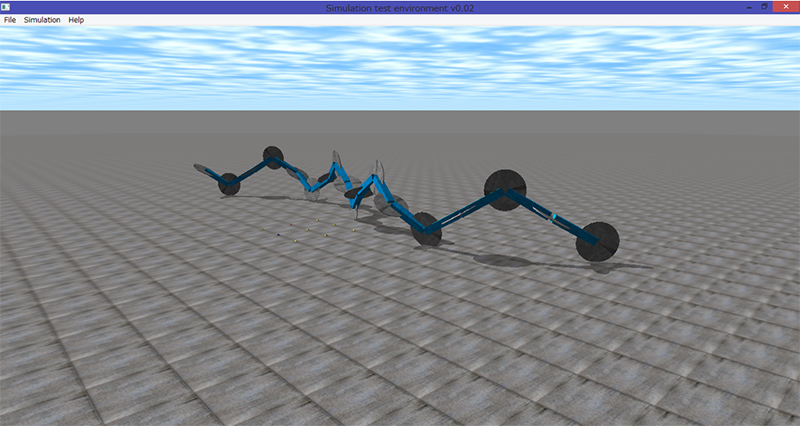
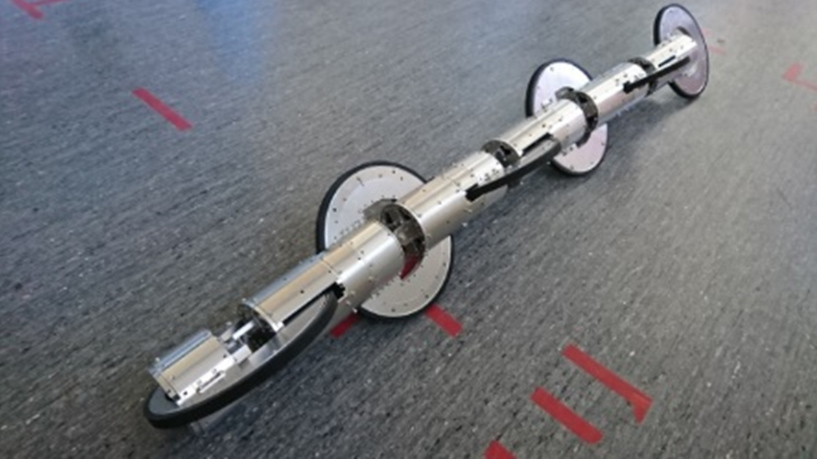
生物模倣ロボット
生命は環境との相互作用を通して、様々な機能や形を獲得していきました。それは、同じ環境で動くロボットを作るときの優れたお手本となります。ロボットの形と動かし方の関係を明らかにして、ロボットに与えられたタスクを効率よく実行するための制御方法について研究します。