先進工学部ロボティクス学科
研究室紹介
当研究室は、知能システムを用いて人間のウェルビーイングを支援する技術の開発に注力しています。WHOが定義する「肉体的にも、精神的にも、そして社会的にも全てが満たされた状態にある」健康を実現するため、IoT、AI、ロボット技術などのイノベーションを活用し、多様な人々が共生する社会に向けた課題解決に取り組んでいます。
研究開発にあたり、ロボット工学、AI、情報工学、生体医工学、感性工学、制御工学などの領域を融合して、人間とロボットが共存する社会の実現に向けた研究を進めています。例えば、知的システムを介して認知症患者や身体障がい者の身体的・精神的なサポートを提供する技術の開発に取り組んでいます。
私たちの研究室では、最先端の知識や技術を身につけることができるだけでなく、社会貢献につながる研究に取り組むことができます。ウェルビーイングに関心がある方や人間支援技術に興味を持っている方は、ぜひ私たちの研究室に参加してください。
主な研究紹介
パーキンソン病患者の歩行検出システムの開発
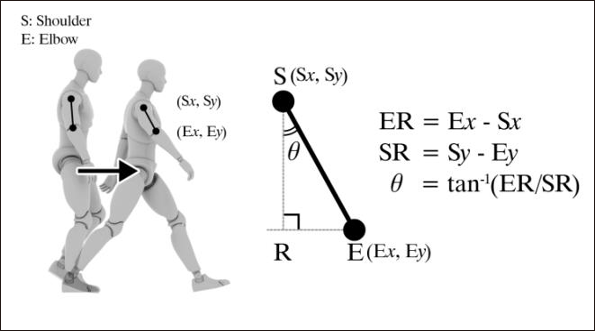
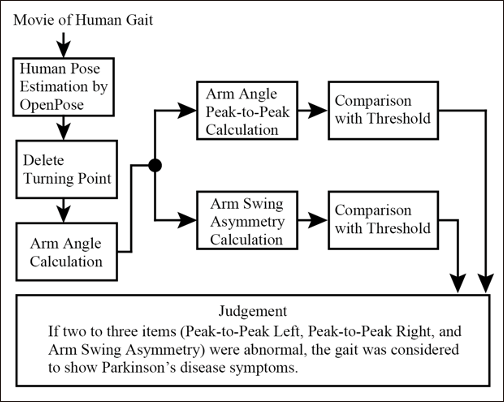
パーキンソン病は脳のドパミン神経細胞が減少し、運動症状に障害が起きる病気です。当研究では、姿勢推定技術OpenPoseを用いて推定した左右の腕の振りの差を利用したパーキン病の歩行解析システムを開発し、早期検出に役立てることを目的としています。
抗パーキンソン病薬を服用している患者、服用していない患者、パーキンソン病と診断されていない人の動画を使用して、映像から腕の角度を比較・分析することで、パーキンソン病症状の腕の振りと正常な腕の振りを区別することができました。
-
パーキンソン病患者の歩行検出システムの開発 1 -
 パーキンソン病患者の歩行検出システムの開発 2
パーキンソン病患者の歩行検出システムの開発 2
つくばチャレンジへの参加に向けた自律移動ロボットの開発
つくばチャレンジは、日本のつくば市で開催される、自律移動ロボットの実証実験および技術競技会です。このイベントは、自律移動ロボット技術の発展とその社会実装を促進することを目的としています。ロボット技術の研究者、開発者、企業、学生などが一堂に会し、最新の技術や研究成果を共有する機会を提供しています。
つくばチャレンジでは、屋外の実環境下でロボットが様々な課題に取り組みます。例えば、自律走行、人や物との交通整理、障害物回避、目的地への到達などです。これらの課題は、実際の社会でのロボットの活用に直結しており、技術の実用化に向けた重要なステップです。
学生にとって、つくばチャレンジは貴重な経験となります。実際の環境でロボット技術を試すことで、理論と実践のギャップを埋めることができるでしょう。また、他の参加者との交流を通じて、新たなアイデアやコラボレーションの可能性を見出すことができます。
