先進工学部ロボティクス学科
研究室紹介
ハードとソフトの両面からサバイバビリティの高い水中ロボットを開発する
人生で一度も海を見たことがない人はいないと思います。海は地表の7割という広大な面積を占めていますが、そんな海底の高精度な地図化は全体の1割程度しかできていません。一方で月はほぼ完全な地図化が行われています。意外と我々は地球のことを知らないのです。
なぜでしょうか?
水中は陸上と比べて過酷だからです。例えば水中では電波が通りません。皆さんが使うWifiは水中では2cm程度で届かなくなります。10m潜れば1気圧程度の圧力がかかります。
そんな世界に人が行くことは容易ではありません。だからロボットがそれを行う必要があるのです。
しかし、ロボットにとっても容易ではありません、電波が通じないので、有線で操縦するか、無線でロボット自身が考えて泳ぐ必要があります。無線のロボットは帰ってこなければ「なぜ帰ってこなかったのか」すらわかりません。
だからこそ水中で泳ぐロボットには「サバイバル(=生存力)」が大切になります。
山縣研究室では、水中ロボットの生存性を上げるために多角的なアプローチを取ります。
①強靭なハードウェア(体)を作る方法を作る
②賢いソフトウェア(頭)を考える
③過去の生物から生き残りの極意を探る
そしてこれらで得られた成果を実際の海で動かすことで証明します。山縣研究室で作ったロボットは南極でその使命を全うします。
決して楽ではないかもしれません。しかしこの研究室で学べばロボットとともに「生き残る」方法が見つかるかもしれません。明日のために生き残る方法を模索しましょう。
主な研究紹介
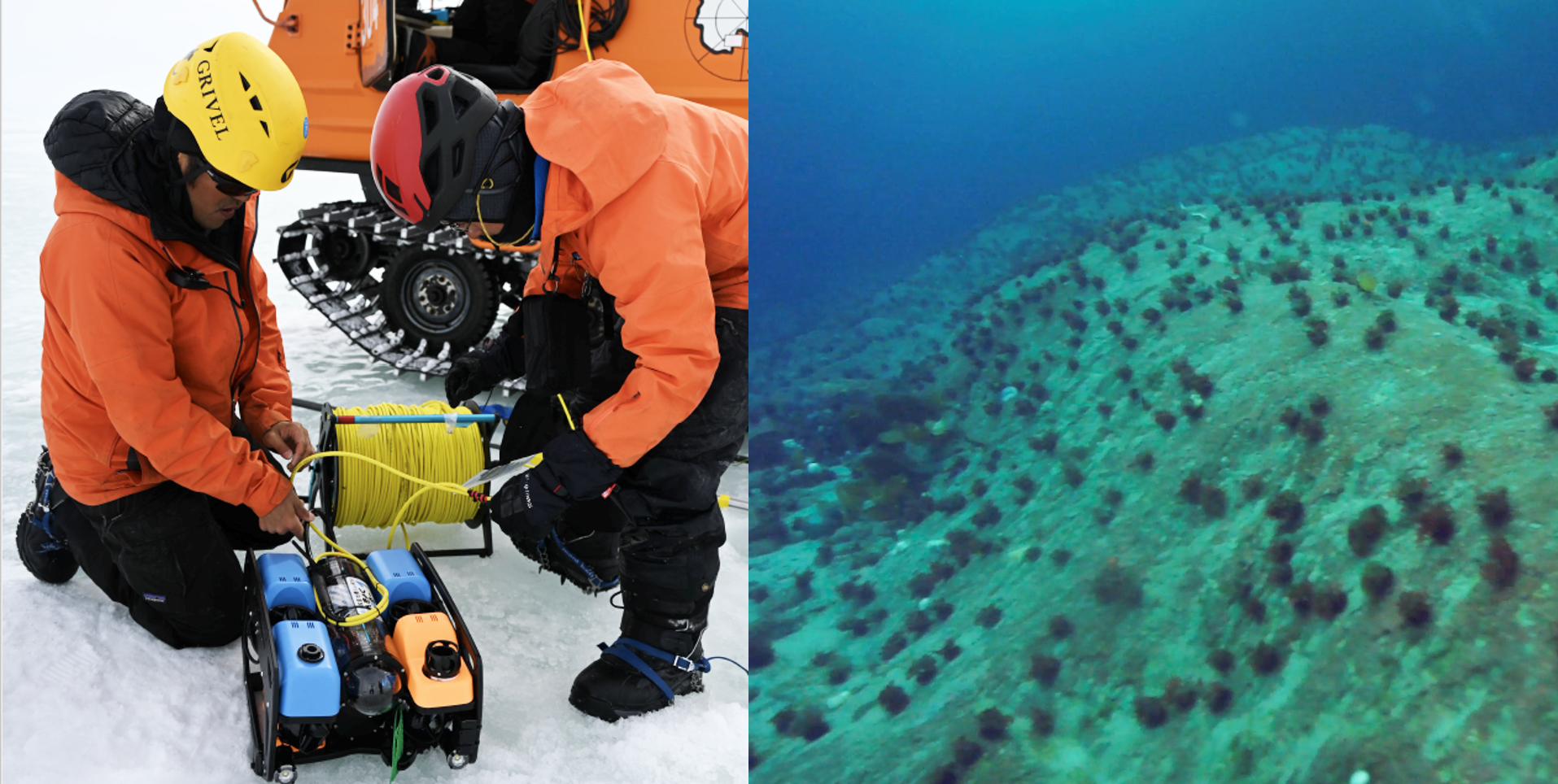
南極観測用水中ロボットの開発
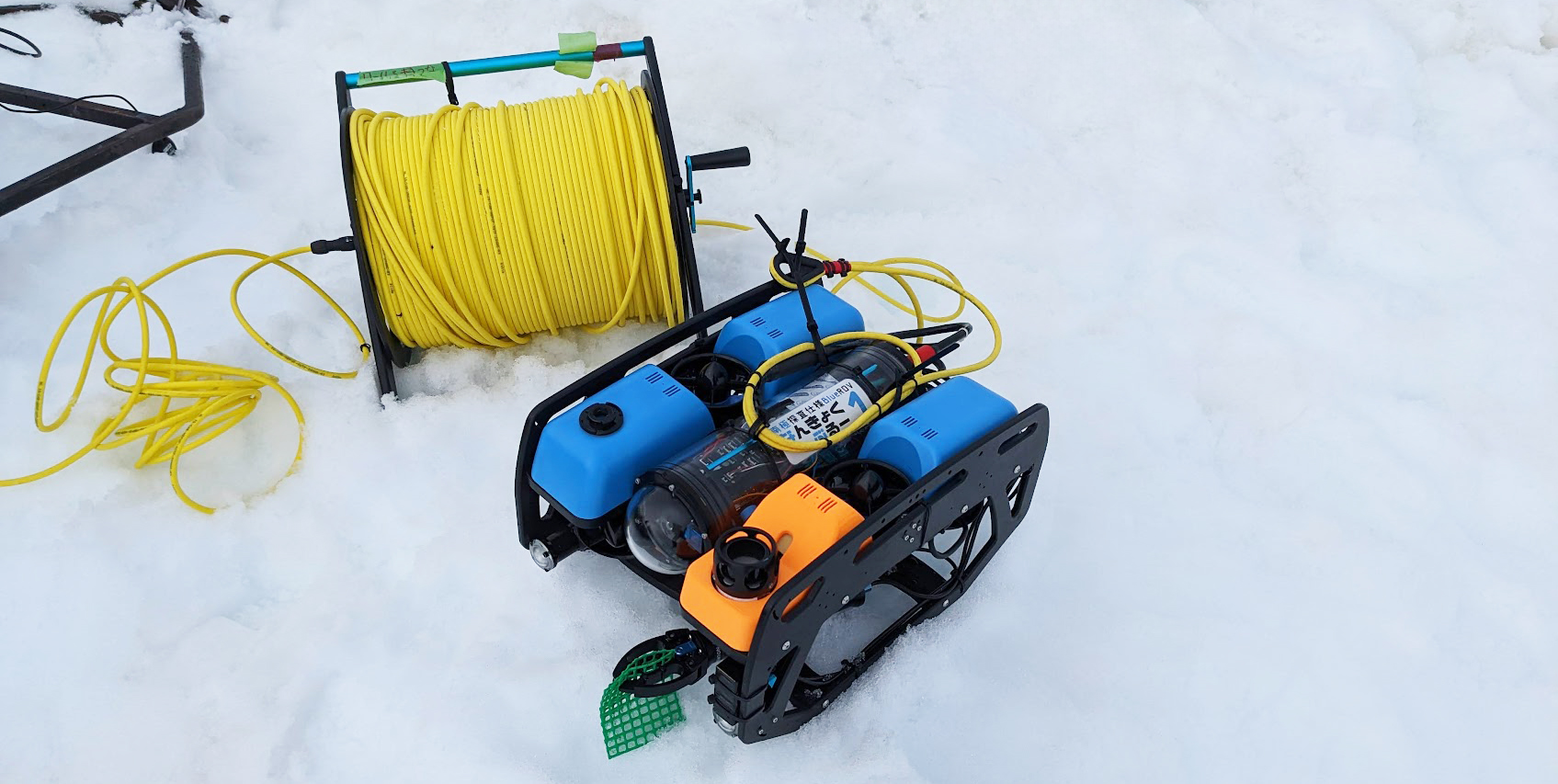
南極のように氷で閉ざされた環境では、水中ロボットに高い信頼性と使いやすさが求められます。なぜなら、観測を行うのは科学者であり、必ずしもロボットの専門家ではないためです。また、氷にあけた小さな穴からの出し入れを前提に、小型高密度かつ堅牢な体と、確実に穴に戻れる賢い頭が必要があります。
そこでこのテーマでは、ハードウェア(体)とソフトウェア(頭)の両面からアプローチし、機体の小型化と利便性の向上を図ります。
ハード面では、3Dプリンタとトポロジ最適化を活用して、軽くて丈夫な機体設計を進めています。自由な形の耐圧構造を実現し、センサ類を機体に埋め込むことで、性能と省スペース性の両立を目指します。
ソフト面では、自己位置推定や帰還誘導の精度向上を通じて、自動化と使いやすさの強化を図っています。極地に耐える性能をクリアすることで、沿岸や狭所といったフィールドでも活用できるロボット技術の確立を目指します。
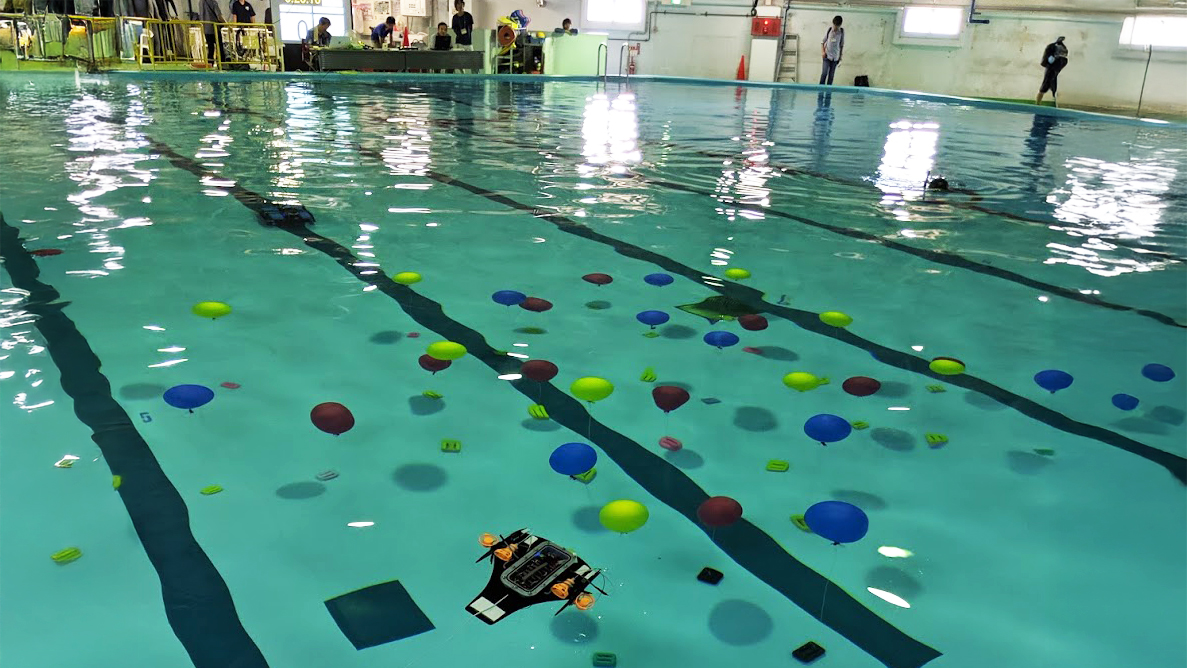
ロボットによるSTEAM教育の実施と効果の検証
水中という環境は、浮力や重力といった力のつり合いを直感では捉えにくく、観察や実験を通じて工学を学ぶのに最適な環境です。こうした特性を活かし、水中ロボットを用いたSTEM教育プログラムを展開してきました。効果測定には、生徒の反応や理解度を多角的に評価する「混合評価法」を用いています。
教材開発だけでなく、初学者、初心者という類似性を活かして、教育効果の検証方法を構築・応用し、水中ロボットのような特殊機材のユーザビリティ評価にも活かせると考えています。例えば、南極観測機のように非専門家が現場運用を担う機体では、開発者とユーザーの認識のズレを減らすための仕組みが求められるため、こういった手法を活かしたいと思います。

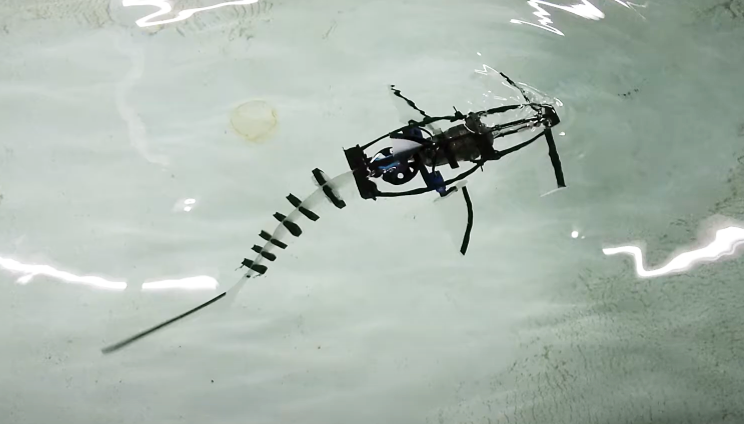
ロボットによる化石復元の妥当性評価
古生物の動作を再現するロボットの開発に取り組んでいます。古生物は、筋骨格や脳の構造が現生生物と比較して単純であったとされ、その動きをロボット機構として再現しやすい特徴があります。
復元を通じて、当時の生物がシンプルな構造ながら環境に適応できた理由を探りたいと思います。どのように適応していたのかを探ることは、ロボットにとっての「適応性」や「頑健性」のヒントにもなります。また、現状の復元研究には物理学的な視点を活かす余地があり、こういったバイオミメティクスの立場から復元に協力することで、自然科学の側にも新しい知見を提供できることを期待しています。